人类的骨骼由206块骨头组成,包括颅骨29块,躯干骨51块,四肢骨126块。形成100多个关节,既然被称为人形机器人,自然也包括很多关节,机器人的关节灵活度需求同样也是以四肢最高,如图1机器人示例,人形机器人轴承的应用数量特别多,这也解释了现在的机器人为什么如此灵活:
机器人灵巧上包含12个行星减速机,
前臂包含4个四点接触轴承和4个球轴承,
上臂包含4个四点接触轴承和4个球轴承,
肘部2个交叉滚子轴承和4个角接触轴承,
肩部包含6个交叉滚子轴承和12个角接触轴承,
腰部包含6个交叉滚子轴承和12个角接触轴承,
大腿包含4个行星滚子丝杠、4个四点接触轴承和4个球轴承
小腿肚同样包含4个行星滚子丝杠、4个四点接触轴承和4个球轴承
这其中,

图1 机器人关键零件构造 by Adam Jonas 人形机器人价值链分析
人形机器人轴承-行星减速器
轴承在行星减速器中的布置取决于其具体内部构造。一般行星轮两端、轴的两端都要布置轴承,或者滚动轴承,或者平面滑动轴承。
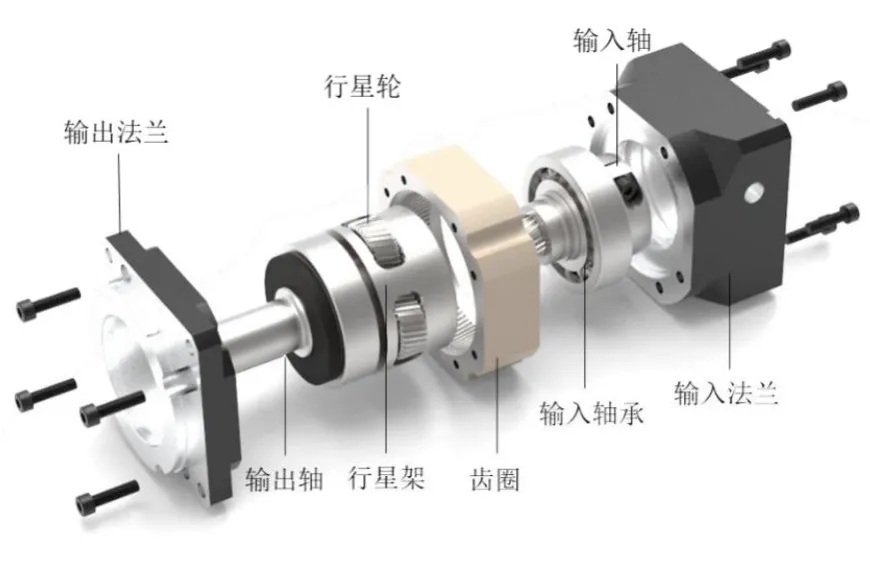
资料来源:科峰
人形机器人轴承-丝杠
不难发现,丝杠作为机器人的关键执行元件,轴承的作用不言而喻,精准、低摩擦、可靠、承载缺一不可。
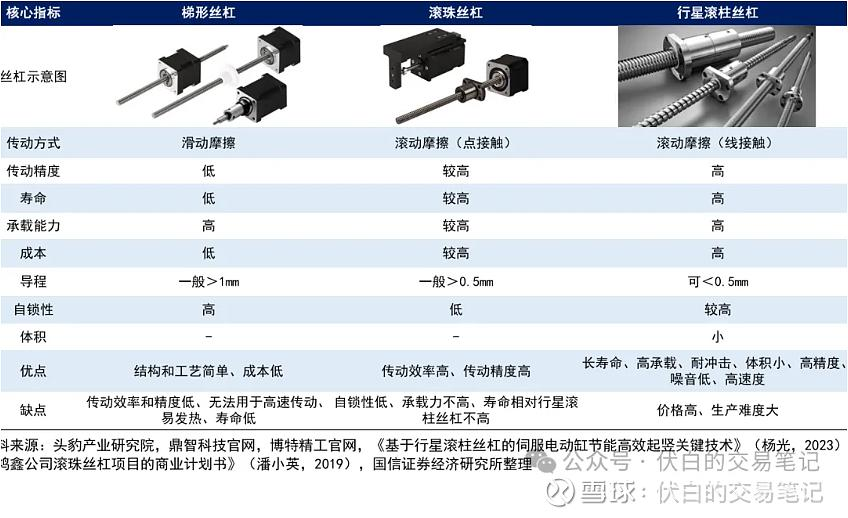
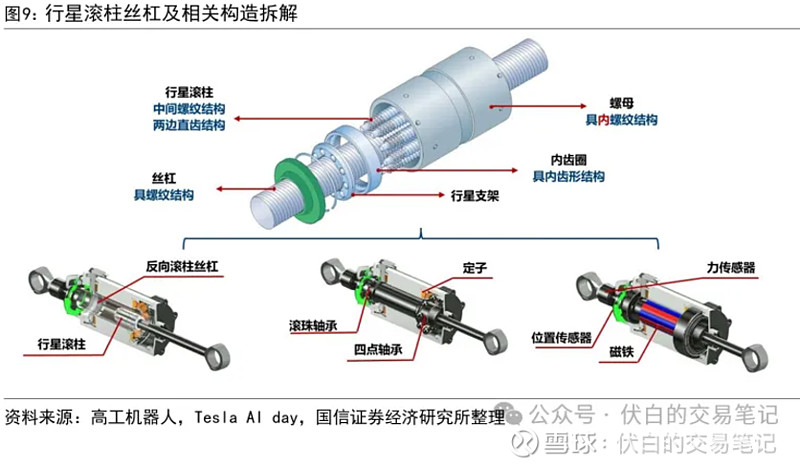
图2 https://xueqiu.com/2305761063/315786988?md5__1038=eqAxuiDtoYq7uYxBqDwCDUgDfOuYtYYH4D